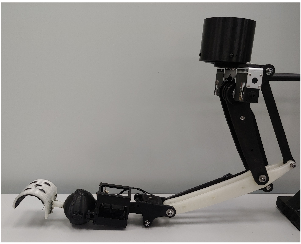
 | Perez-Jimenez, M.A. Montes-Grova, P. Ramon-Soria, B.C. Arrue1and A. Ollero1. POSITRON: lightweight active positioning compliant joints robotic arm in power lines inspection. In ICUAS 2020 [LINK] |
 | R. Lopez-Lopez, V. Perez-Sanchez, P. Ramon-Soria, A. Martín-Alcantara, R. Fernandez-Feria , B.C. Arrue and A. Ollero. A Linearized Model for an Ornithopter in Gliding Flight: Experiments and Simulations. In ICRA 2020 [LINK] |
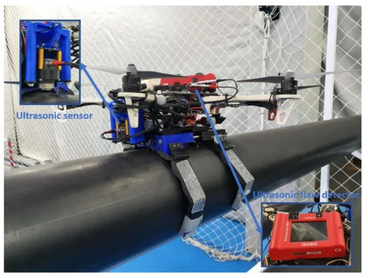
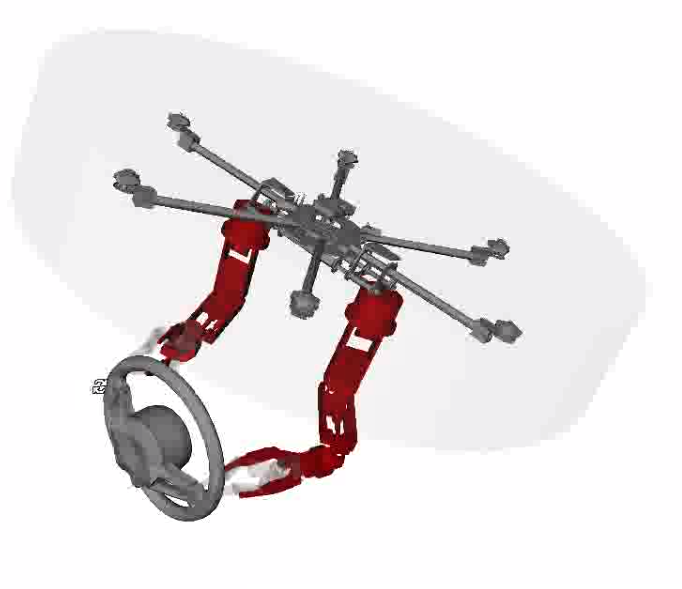
 | P. Ramon-Soria, Gomez-Tamm, A., Garcia-Rubiales, F., Arrue, B., & Ollero, A. Autonomous landing on pipes using soft gripper for inspection and maintenance in outdoor environments. In IROS 2019 |
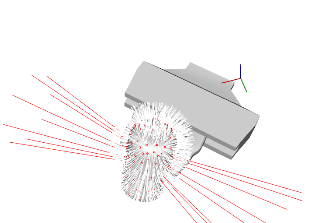
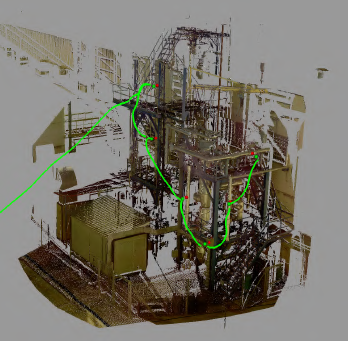 | P. Ramon-Soria, M. Perez-Jimenez, B. C. Arrue and A. Ollero, “Planning System for Integrated Autonomous Infrastructure Inspection using UAVs,” 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 2019, pp. 313-320. [LINK] |
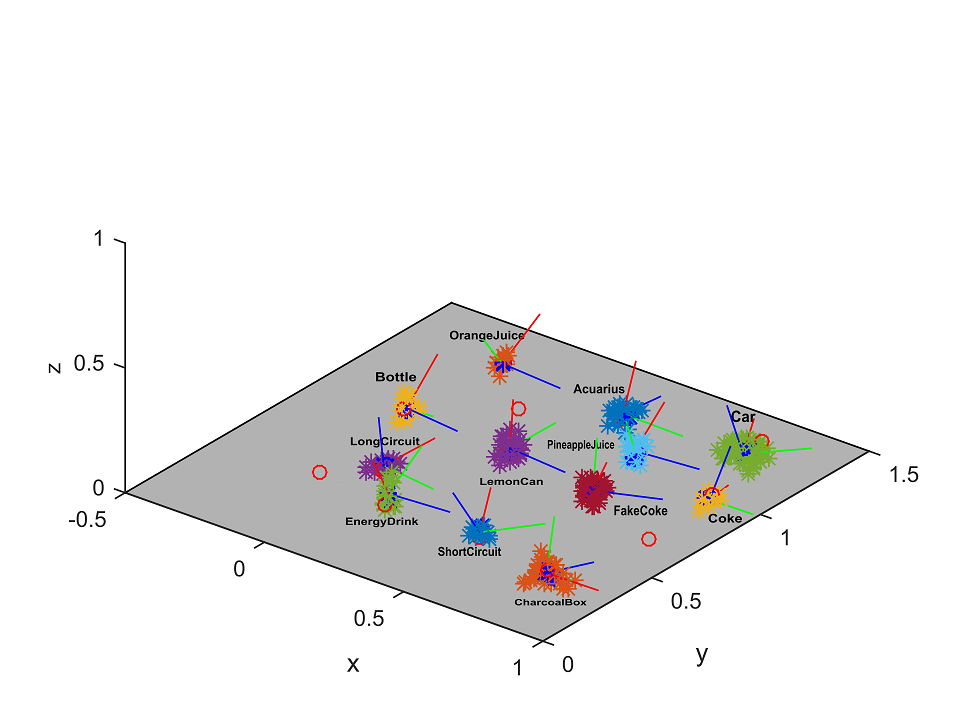
 | P. Ramon-Soria, Sukkar, F., Martens, W., Arrue, B. C., & Fitch, R. (2018). Multi-view probabilistic segmentation of pome fruit with a low-cost rgb-d camera. In Robot 2017: third iberian robotics conference (pp. 320–331). Cham: Springer International Publishing. |
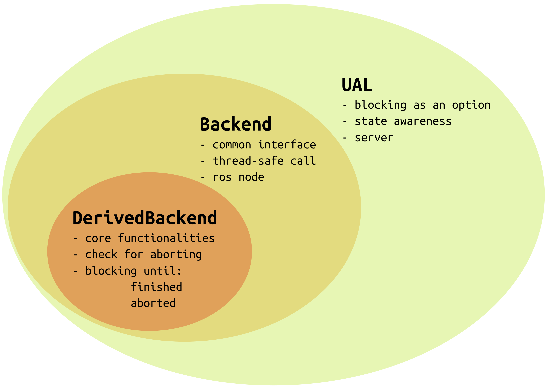 | Real, F., Torres-González, A., P. Ramon-Soria, Capitán, J., & Ollero, A. (2018). Ual: an abstraction layer for unmanned aerial vehicles. In 2nd international symposium on aerial robotics. |
 | Suarez, A., P. Ramon-Soria, Heredia, G., Arrue, B. C., & Ollero, A. Anthropomorphic, compliant and lightweight dual-arm system for aerial manipulation. In IROS 2017 (pp. 992–997) |
 | Acevedo, J., Garcia, M., Viguria, A., P. Ramon-Soria, Arrue, B., & Ollero, A. (2017). Autonomous landing of a multicopter on a moving platform based on vision techniques. In Iberian robotics conference (pp. 272–282). Springer. |
| Aguilar, J., P. Ramon-Soria, Arrue, B., & Ollero, A. (2017). Cooperative perimeter surveillance using bluetooth framework under communication constraints. In Iberian robotics conference (pp. 771–781). Springer. |
 | P. Ramon-Soria, Palomino, A. F., Arrue, B., & Ollero, A. (2017). Bluetooth network for micro-uavs for communication network and embedded range only localization. In 2017 international conference on unmanned aircraft systems (ICUAS) (pp. 747–752). IEEE. |
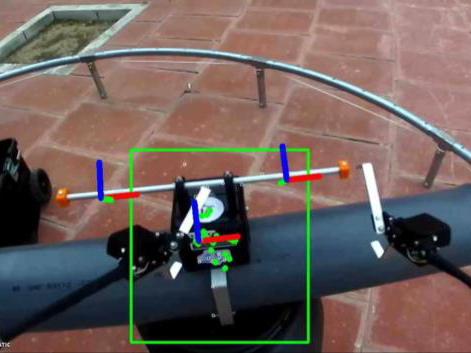
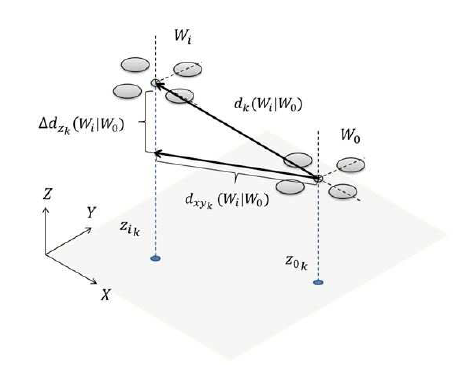
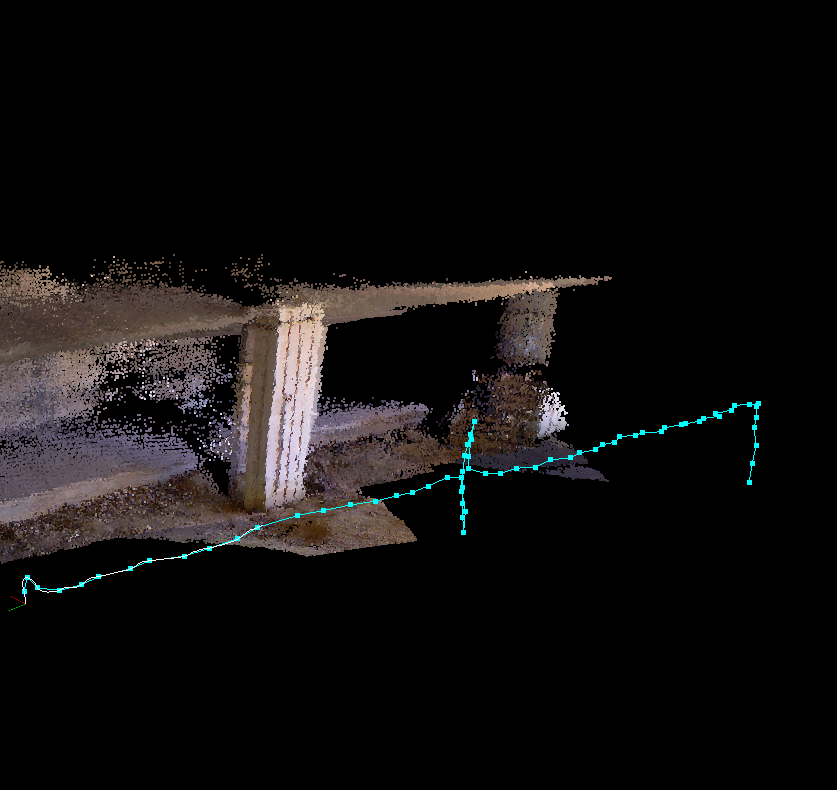 | Prada-Delgado, J., P. Ramon-Soria, Arrue, B., & Ollero, A. (2017). Bridge mapping for inspection using an uav assisted by a total station. In Iberian robotics conference (pp. 309–319). Springer. |
| P. Ramon-Soria, Arrue, B. C., Acevedo, J. J., & Ollero, A. (2016). Visual surveillance system with multi-uavs under communication constrains. In Robot 2015: second iberian robotics conference (pp. 705–713). Springer. |