Grasping tools
The focus of my research at the University of Seville is to enable aerial robots to grasp and manipulate in the air. During, this research, all the code related to object analysis and grasp generation has been integrated into a library called Grasping_Tools.
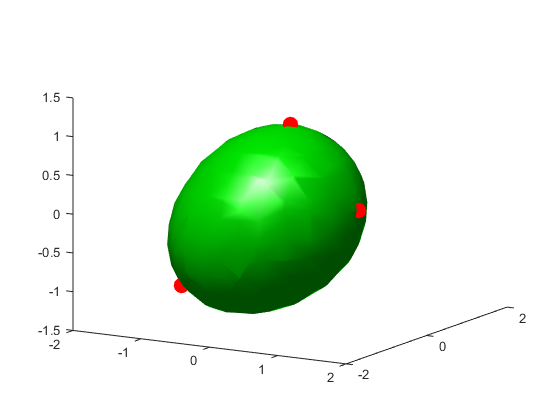
This library includes a general class for dealing with objects. Different implementations have been introduced according to different sensors and models. One interesting implementation has been coded using the probabilistic framework of Gaussian Processes. This model has pretty interesting features such as handling uncertainty or surface reconstruction from scattered data.


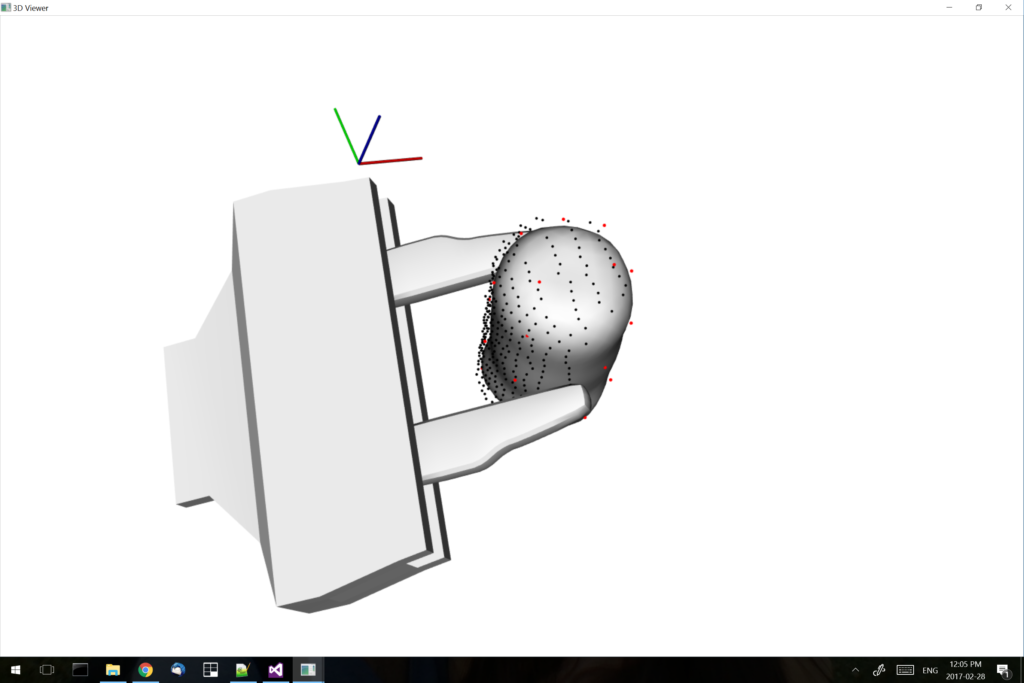
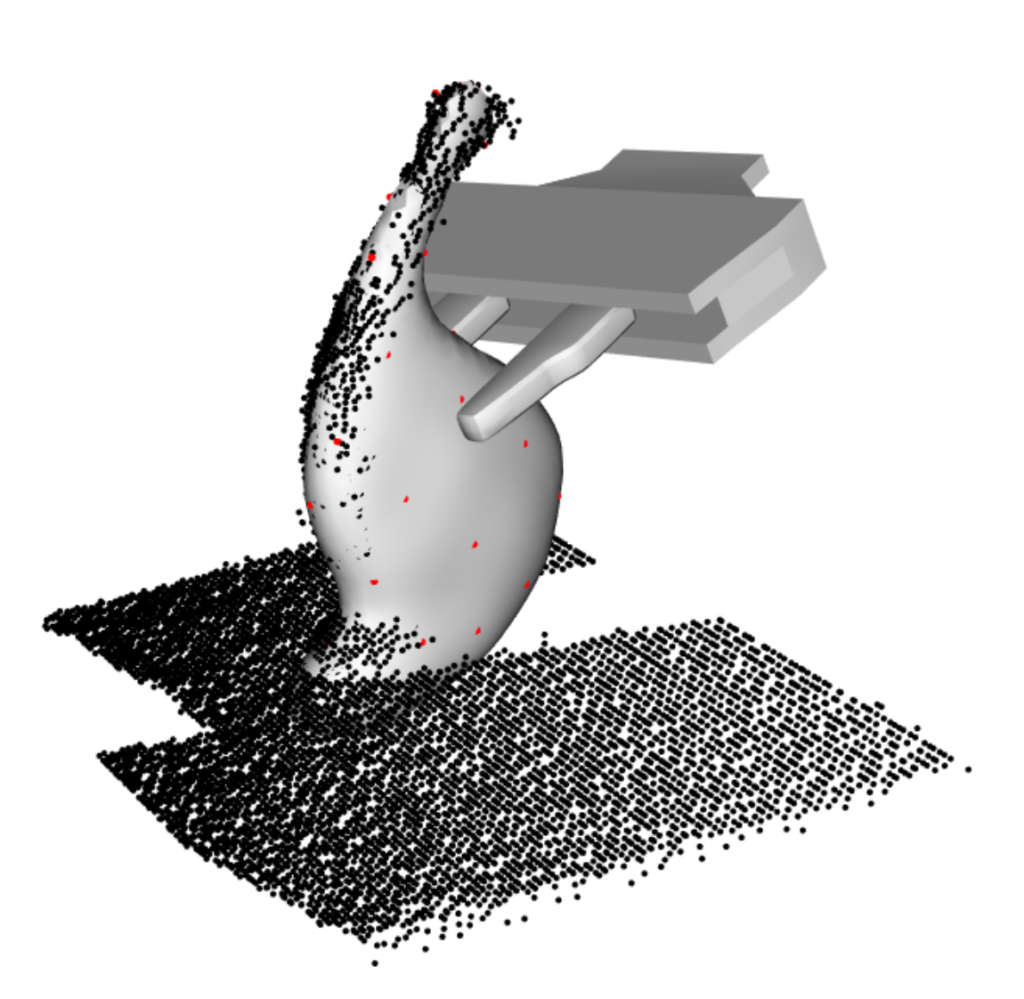
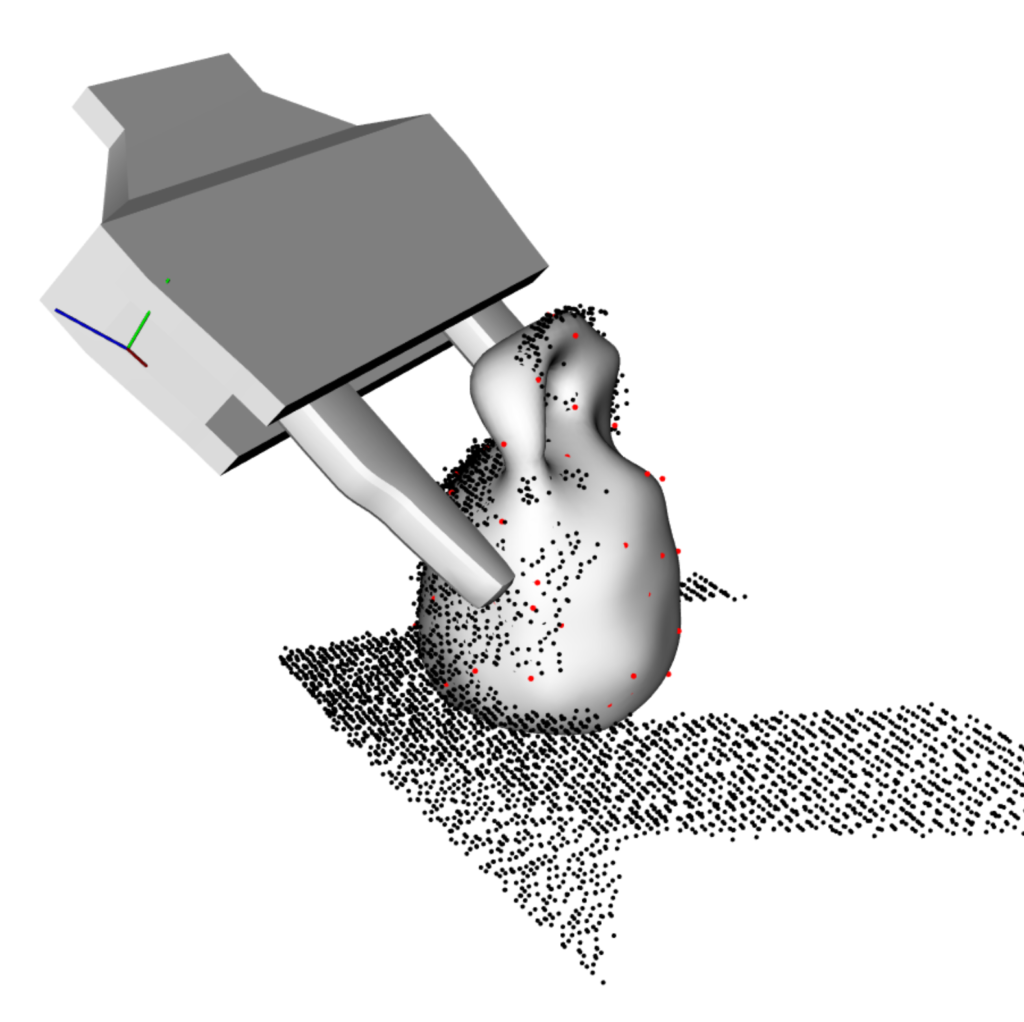
Regardless of the model, a generalized grasp generation pipeline has been implemented to ease the generation of new robotics applications.
The last branch of this work focuses in the use of deep learning techniques to generate grasps for objects, but it has not been released yet.
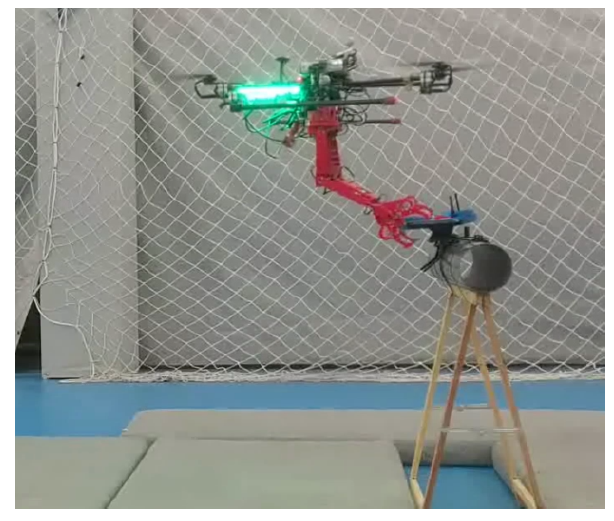
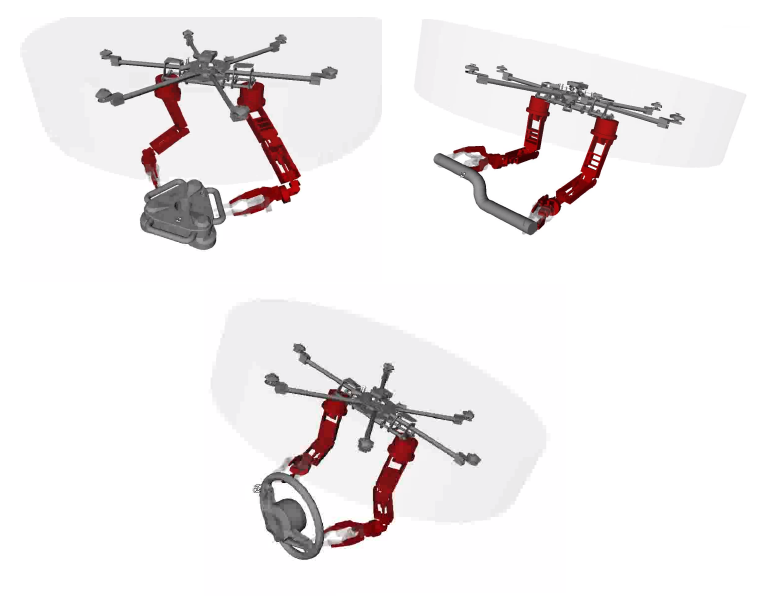
Hecatonquiros

Hecatonquiros is a complete open-source ecosystem for low cost and lightweight robotic manipulators. It has been released to focus on aerial manipulation applications but can be used in any other robotic application that requires the use of manipulators. It provides the control system, a simulation environment and a set of back-ends to allow reusing the algorithms with different hardware setups. Several manipulators models and end-effectors are available for the users to adapt to their different requirements. All the hardware is designed to be 3D printed and its components are low cost and available in common robotic stores, so anyone can reproduce and use them.

Both hardware and software have been tested in real applications embed in Unmanned aerial robots for autonomous grasping applications.

MICO

MICO (or Modular Interchangeable Computer prOgramming) is an Open-Source framework for programming without coding. The target audience of the framework is varied. It was initially designed and developed at the University of Seville by the Group of Robotics Vision and Control, the purpose was to create fastly applications which may have similar core concepts but with some interchangeable parts.
The Framework is based in a lowlevel library called FLOW, this library is the responsible of abstracting the data streams so it is easy to interconnect different pieces of the application.
The library has a QT-based wrapper that allows to interconnect create new applications dinamically without any piece of code, based on a preexisting library of modules or blocks. The QT-Based interface is a fork of the library nodeeditor. We highly appreciate placeholder for its wonderful creation.
The rest of the framework are a set of plugins or (mplugins) which implement the specific blocks to be used by the visual interface flow_kids. Some plugins are cameras-mplugin, arduino-mplugin, dvs-mplugin, slam-mplugin, ml-mplugin…
FASTCOM
(https://github.com/Bardo91/fastcom) Easy to use, low-weight and portable communication system with publisher-subscribers and service client-servers
FLOW

(https://github.com/Bardo91/flow) Meta library to code data-flow oriented applications. The library includes a QT-based environment to create applications with blocks.